Milker: Unterschied zwischen den Versionen
K (fixed links that should have been underlined. now they are. Also used strike and updated the requirement for AMOR to be waterproof.) |
|||
| Zeile 1: | Zeile 1: | ||
| − | [https://forum.opensourceecology.de/viewtopic.php?f=28&t=566&p=2807#p2807| --> Updates & News | + | [https://forum.opensourceecology.de/viewtopic.php?f=28&t=566&p=2807#p2807| --> Updates & News (Forum)] |
==Motivation for an autonomous milking ongoing robot (AMOR)== | ==Motivation for an autonomous milking ongoing robot (AMOR)== | ||
| − | + | <u>An autonomous system results in the following dis-/advantages:</u> | |
* + Indepence (no more need to be there to milk morning and evening, 7days/week) | * + Indepence (no more need to be there to milk morning and evening, 7days/week) | ||
* - Machine service increases | * - Machine service increases | ||
| Zeile 16: | Zeile 16: | ||
| − | + | <u>An ongoing system results in the following (dis-)advantages:</u> | |
* - Higher complexity. | * - Higher complexity. | ||
* + Independance of any external supplies. | * + Independance of any external supplies. | ||
| Zeile 34: | Zeile 34: | ||
==Separation in Subproblems & Technological Difficulties == | ==Separation in Subproblems & Technological Difficulties == | ||
| − | + | <u>AMOR of several submodules:</u> | |
* MECHANICAL CONSTRUCTION | * MECHANICAL CONSTRUCTION | ||
| − | ** - Difficult to | + | ** - Difficult to achieve a robust, lightweight (for truck to lift) & cheap system at the same time. |
| − | ** + Rain serves as a water supply and natural (ecologic) washing. | + | ** + Rain serves as a water supply and natural (ecologic) and self-sustained washing. -> So AMOR '''must be waterproof'''! |
* VACUUM SYSTEM | * VACUUM SYSTEM | ||
** - Difficult to be flexible in frequency (provide user settings) and keep it simple at the same time. | ** - Difficult to be flexible in frequency (provide user settings) and keep it simple at the same time. | ||
| − | ** + Could be used for several other functionality than milking (doors, ...). => No hydraulics needed. Update: We have settled on keeping it all electric as it's much cheaper and we need electricity anyway. | + | ** + Could be used for several other functionality than milking (<strike>doors</strike>, ...). => No hydraulics needed. Update: We have settled on keeping it all electric as it's much cheaper and we need electricity anyway. |
** Note: As the robotic manipulator should be flexible anyway as it could be hit by the cow, compressible air/vacuum could serve this purpose, too - but price of vacuum cylinders and the vulnerability to leakage remains a problem. | ** Note: As the robotic manipulator should be flexible anyway as it could be hit by the cow, compressible air/vacuum could serve this purpose, too - but price of vacuum cylinders and the vulnerability to leakage remains a problem. | ||
** Vacuum pump: Any pump should do, as the required vacuum levels are low and we don't have a lot of volume to keep free of gases in a mobile system because there is not much piping. | ** Vacuum pump: Any pump should do, as the required vacuum levels are low and we don't have a lot of volume to keep free of gases in a mobile system because there is not much piping. | ||
| Zeile 70: | Zeile 70: | ||
==Discussion== | ==Discussion== | ||
| − | '''Feel free to post critiques or technical stuff here - alternatively use the forum or | + | '''Feel free to post critiques or technical stuff here - alternatively use the forum or use the "talk" page.''' --Jan |
*Topic | *Topic | ||
Version vom 4. Februar 2014, 03:49 Uhr
Motivation for an autonomous milking ongoing robot (AMOR)
An autonomous system results in the following dis-/advantages:
- + Indepence (no more need to be there to milk morning and evening, 7days/week)
- - Machine service increases
- + Technical knowledge increases, hence perhaps some other good robot ideas may evolve.
- + Cows/Goats/Sheep can decide themselves when to get milked.
- + Concentrated feed can be delivered automatically and according to milk delivered.
- - Animals' possible illness not realized early enough. => Action taken too late. => Animal could die.
- - Gathering at Milking robot leaves behind a lot of unusable muddy terrain at entrance (doors in general).
- - Higher complexity in separation of milk for calves, though of course possible.
- + Driving out and in of cattle no longer necessary as animals can get milked outside.
- + Less material required (much shorter vacuum and milk tubes as compared to conventional non-automated distributed [at cow/goat..] milking)
- ... and several others.
An ongoing system results in the following (dis-)advantages:
- - Higher complexity.
- + Independance of any external supplies.
** Water (heavily dependent on environment) ** Power (Solar/Heat/Water/MFC replaces Grid) ** Food (difficult, nevertheless this is planned for later revisions of AMOR)
- - Redundancy of susceptible subsystems (Electronics, in general: The more complex the system the higher the vulnerability).
- + Less cabling, water pipe laying and bundled maintenance (as you can wait for enough minor errors to accumulate before taking the system apart).
- ... and several others.
High Level Overview
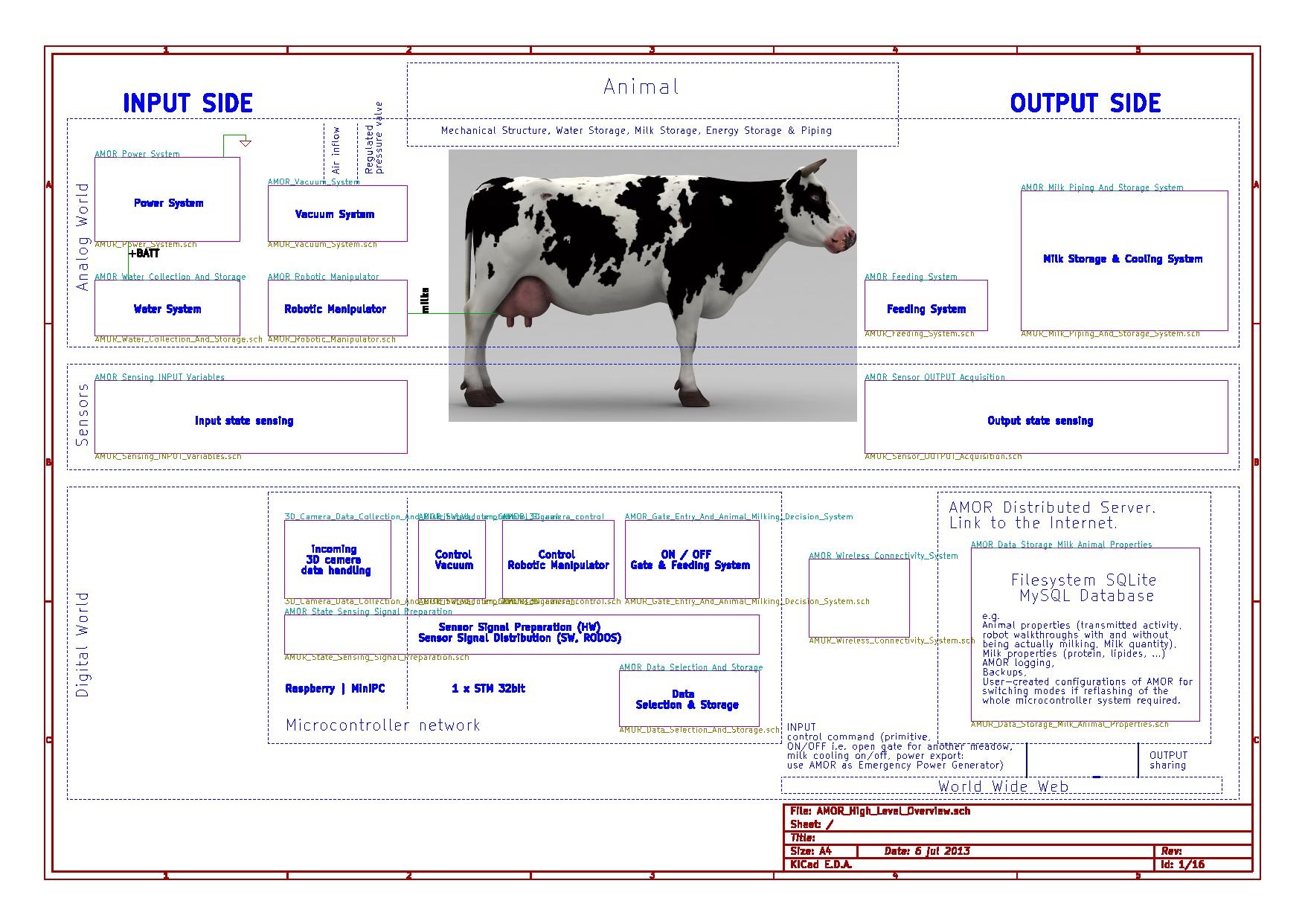 PDF Version: REV2, Improved & interconnected.
PDF Version: REV2, Improved & interconnected.

Separation in Subproblems & Technological Difficulties
AMOR of several submodules:
- MECHANICAL CONSTRUCTION
- - Difficult to achieve a robust, lightweight (for truck to lift) & cheap system at the same time.
- + Rain serves as a water supply and natural (ecologic) and self-sustained washing. -> So AMOR must be waterproof!
- VACUUM SYSTEM
- - Difficult to be flexible in frequency (provide user settings) and keep it simple at the same time.
- + Could be used for several other functionality than milking (
doors, ...). => No hydraulics needed. Update: We have settled on keeping it all electric as it's much cheaper and we need electricity anyway. - Note: As the robotic manipulator should be flexible anyway as it could be hit by the cow, compressible air/vacuum could serve this purpose, too - but price of vacuum cylinders and the vulnerability to leakage remains a problem.
- Vacuum pump: Any pump should do, as the required vacuum levels are low and we don't have a lot of volume to keep free of gases in a mobile system because there is not much piping.
- STORAGE CONSTRUCTION
- Milk
- Food
- Water
- Energy
- Database for animals milk (amount, properties, ...)
- Database for organization of the cow's fertile cycle, ...
- SENSORICS
- Milk properties (flow rate, derivations of that, TODO)
- Robotic manipulator (3D camera, washing mechanism)
- Animal within milking construction => Door states.
- ELECTRONICS
- Control of Doors.
- Control of Feeding (derived from amount of milk), but also accept some user constraints (lower / upper bounds for each type of food respectively).
- Control of Robotic manipulator (joints, gripper).
- Collection & storage of the stored animal & product data.
- SOFTWARE
- Microcontroller programs capable of controlling at least two AMOR system blocks (stacked next to each other).
- compare ELECTRONICS.
Power system
Several ideas for autonomous power can be found in the forum. The easiest solution for now will be to attach a truck or emergency generator (UPS) or simply an extension cord. So we need a possibility to plug it into the grid (1-phase might be too low, but let's go for that first as the vacuum system needs by far less energy in a mobile robot than in a conventional one). For regenerative purposes a 100 kW inverter is planned and is waiting to be tested (once I have the equipment). The last autumn prototype was a failure in too many aspects (rigidity, linear gliders of robotic manipulators) so that design was adapted in the meantime and is waiting for me finishing several blender addons. [1]
Discussion
Feel free to post critiques or technical stuff here - alternatively use the forum or use the "talk" page. --Jan
- Topic
- Answer
- Another post
- next topic
- answer
- ..