Bohrautomat: Unterschied zwischen den Versionen
Case (Diskussion | Beiträge) |
Case (Diskussion | Beiträge) |
||
| Zeile 71: | Zeile 71: | ||
=== Konstruktion === | === Konstruktion === | ||
<gallery widths="490" heights="384" perrow="2" caption="Bohrautomat - Steuerung und Schrittmotor-Treiber"> | <gallery widths="490" heights="384" perrow="2" caption="Bohrautomat - Steuerung und Schrittmotor-Treiber"> | ||
| − | Ba_ra_pol_pow | + | Ba_ra_pol_pow.jpg| Als Steuerung dient ein RAMPS1.4 mit 4 Pololu-Steppertreibern und zwei Powerlolu-treibern für die Y-Achse, auf welcher das schwere Portal bewegt wird. |
Ba_stepper_yzx.jpg| Dazu dienen die zwei großen 3Nm-Stepper. Die X-Achse wird mit den beiden mittleren 1Nm-Steppern angehoben und gesenkt und die Spindelmountplatte wird mit den beiden kleinen 0.52Nm-Steppern in X-Richtung hin- und her bewegt. | Ba_stepper_yzx.jpg| Dazu dienen die zwei großen 3Nm-Stepper. Die X-Achse wird mit den beiden mittleren 1Nm-Steppern angehoben und gesenkt und die Spindelmountplatte wird mit den beiden kleinen 0.52Nm-Steppern in X-Richtung hin- und her bewegt. | ||
| − | |||
| − | |||
</gallery> | </gallery> | ||
...tbc. | ...tbc. | ||
Version vom 23. Juni 2014, 10:12 Uhr
Dieser Bohrautomat soll hauptsächlich dazu dienen, die Teile des UniProKit Basis-Set Strukturelemente automatisch bohren zu können, auf eine Länge von 1m.
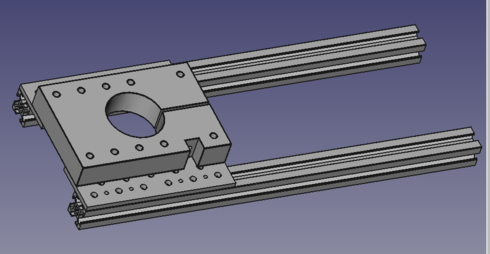
X-Achse
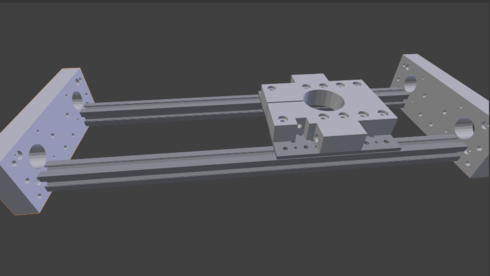
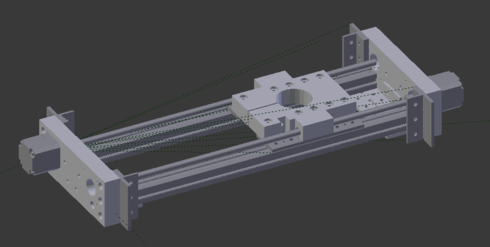
Konstruktion
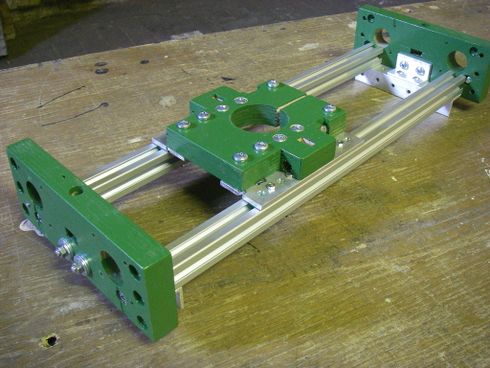
- Bohrautomat - X-Achse 3D-Darstellung
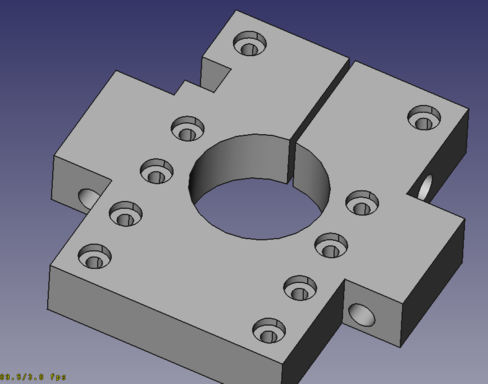
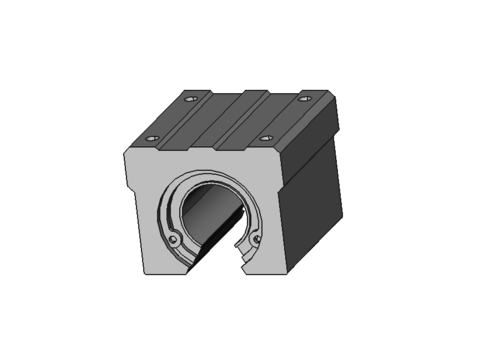
Halterung für Frässpindel
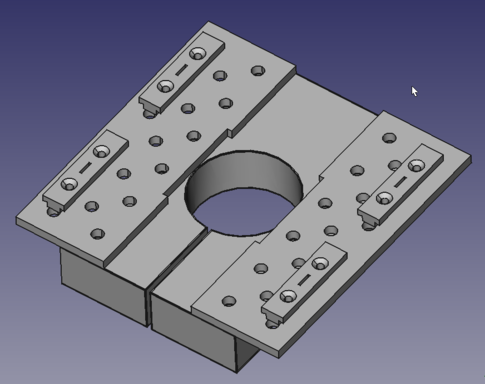
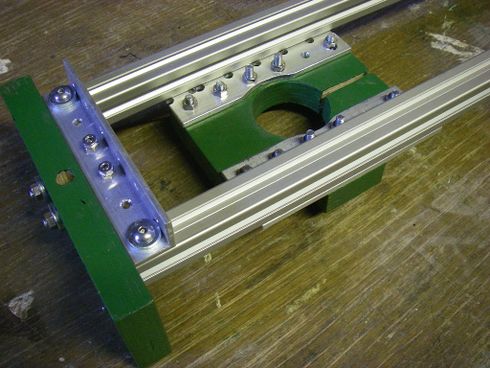
Halterung von unten - man sieht die Slider-Elemente
Die Slider laufen direkt in der Nute des T-Slot-Profils
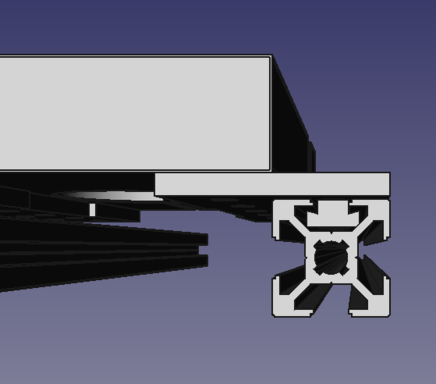
Detailansicht
Seitliche Motormount-Platten
Ansicht mit Steppern und Gewinde






Herstellung der Spezialteile aus Multiplex-Platte
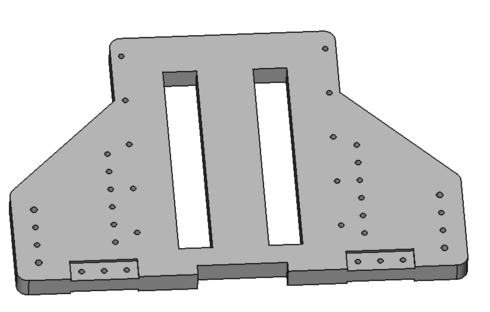
- Bohrautomat - Spezialteile

Die Platten werden aus Multiplex-Platte hergestellt - leicht zu bearbeiten aber relativ verzugarm
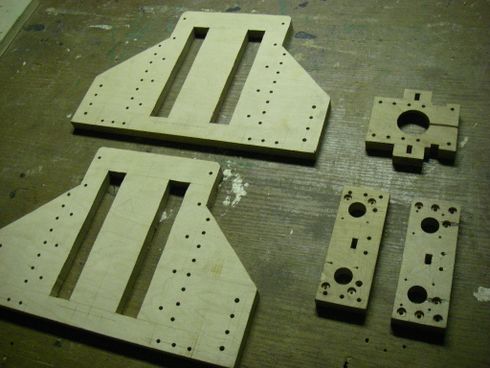
Alles ausgeschnitten und gebohrt

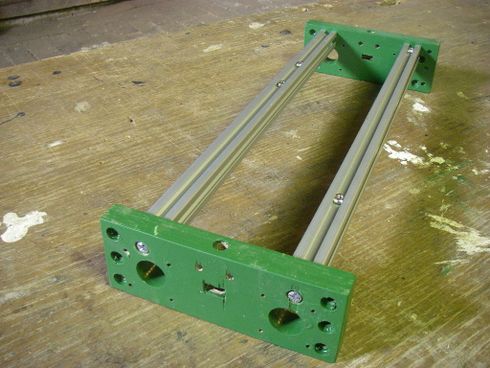
und grün gestrichen



Zusammenbau der X-Gantry
- Bohrautomat - X-Gantry

Sliderhalter von oben

Sliderhalter von unten

Spindelmountplatte von oben

Spindelmountplatte von unten

X-T-slot-Frame von oben
X-T-slot-Frame von unten
X-Gantry zusammengebaut, von oben
X-Gantry zusammengebaut, von unten
X-Gantry komplett usammengebaut, von unten

X-Gantry zusammengebaut, mit Kress FME1050 als Frässpindel









Z-Achse
Konstruktion
- Bohrautomat - Z-Achse 3D-Darstellung
Die Seitenplatten stellen die Z-Achse dar, ...
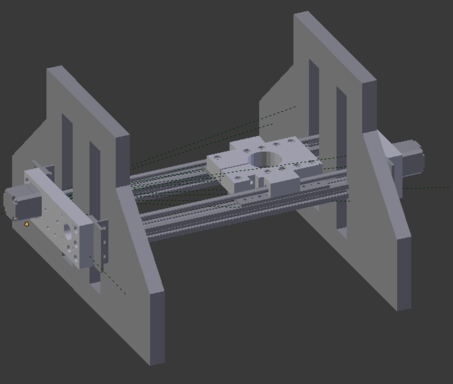
... weil hier die X-Achse rauf und runter bewegt wird


Y-Achse
Konstruktion
- Bohrautomat - Y-Achse 3D-Darstellung
Das gesamte Portal wird auf diesen Schlitten befestigt ...

... welche auf der langen Y-Achse laufen


Elektronik
Konstruktion
- Bohrautomat - Steuerung und Schrittmotor-Treiber
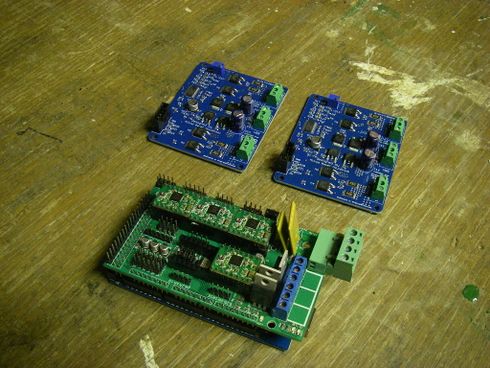
Als Steuerung dient ein RAMPS1.4 mit 4 Pololu-Steppertreibern und zwei Powerlolu-treibern für die Y-Achse, auf welcher das schwere Portal bewegt wird.
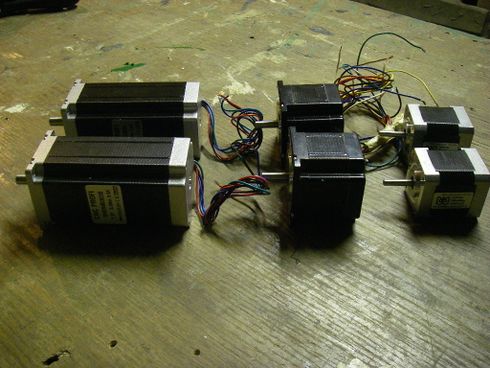
Dazu dienen die zwei großen 3Nm-Stepper. Die X-Achse wird mit den beiden mittleren 1Nm-Steppern angehoben und gesenkt und die Spindelmountplatte wird mit den beiden kleinen 0.52Nm-Steppern in X-Richtung hin- und her bewegt.


...tbc.