Bohrautomat
Dieser Bohrautomat soll hauptsächlich dazu dienen, die Teile des UniProKit Basis-Set Strukturelemente automatisch bohren zu können, auf eine Länge von 1m.
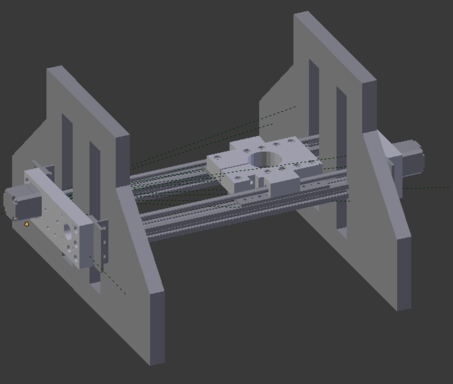
X-Achse
Konstruktion
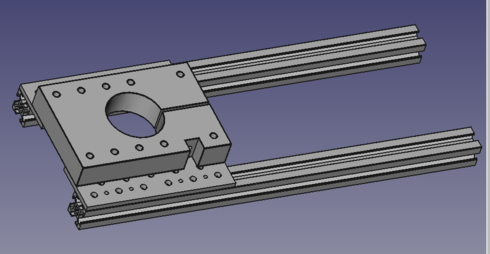
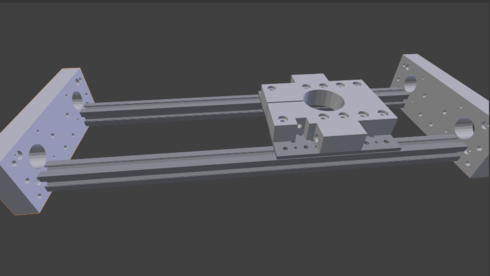
- Bohrautomat - X-Achse 3D-Darstellung
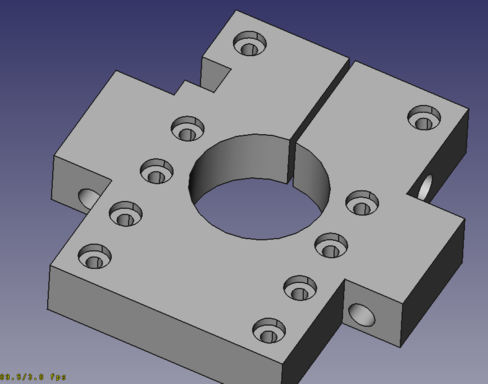
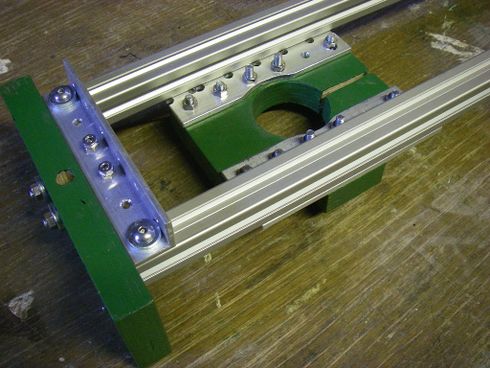
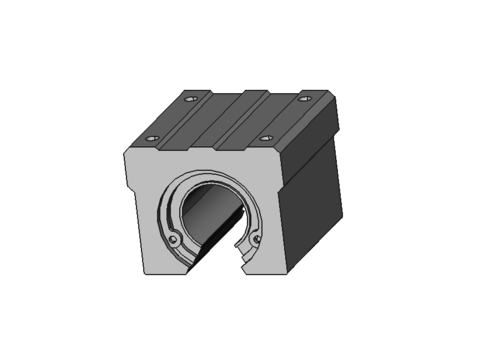
Halterung für Frässpindel
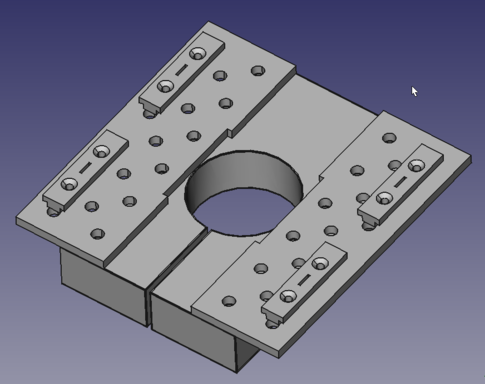
Halterung von unten - man sieht die Slider-Elemente
Die Slider laufen direkt in der Nute des T-Slot-Profils
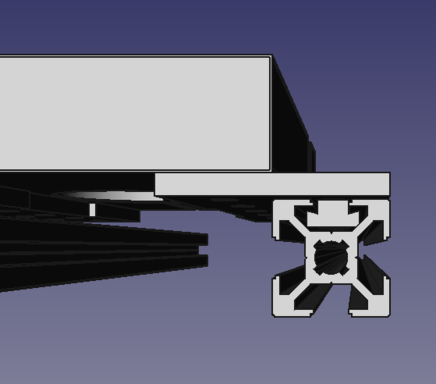
Detailansicht
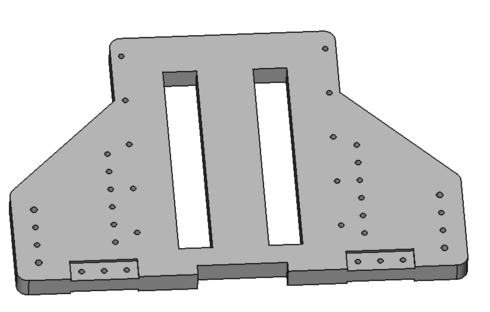
Seitliche Motormount-Platten
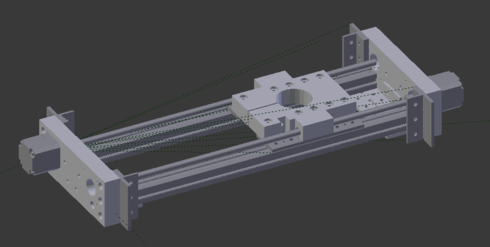
Ansicht mit Steppern und Gewinde






Herstellung der Spezialteile aus Multiplex-Platte
- Bohrautomat - Spezialteile

Die Platten werden aus Multiplex-Platte hergestellt - leicht zu bearbeiten aber relativ verzugarm
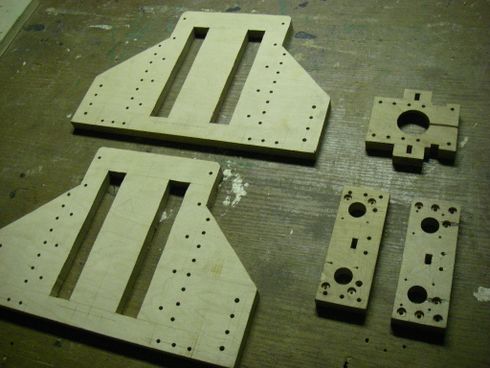
Alles ausgeschnitten und gebohrt

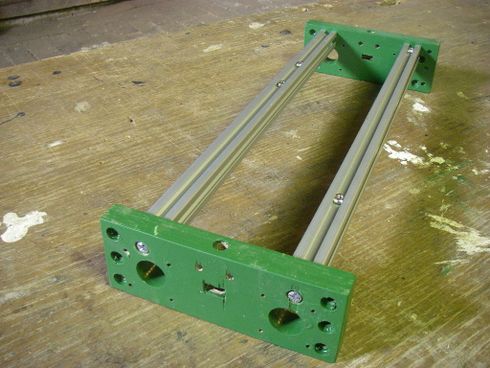
und grün gestrichen



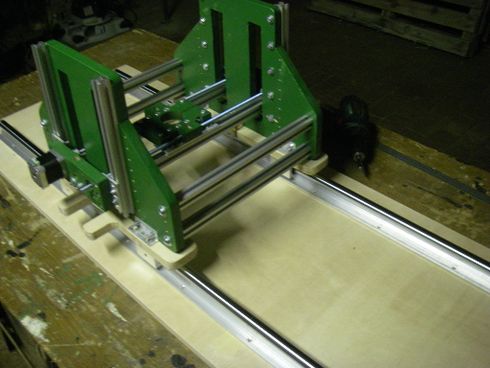
Zusammenbau der X-Gantry
- Bohrautomat - X-Gantry

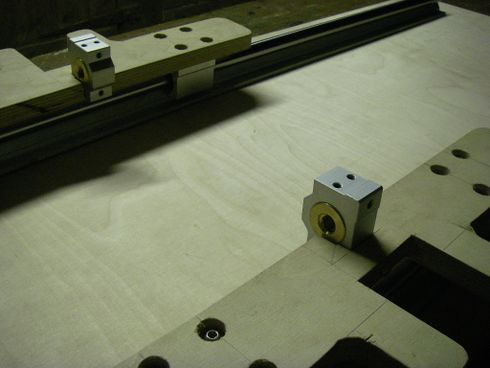
Sliderhalter von oben

Sliderhalter von unten

Spindelmountplatte von oben

Spindelmountplatte von unten

X-T-slot-Frame von oben
X-T-slot-Frame von unten
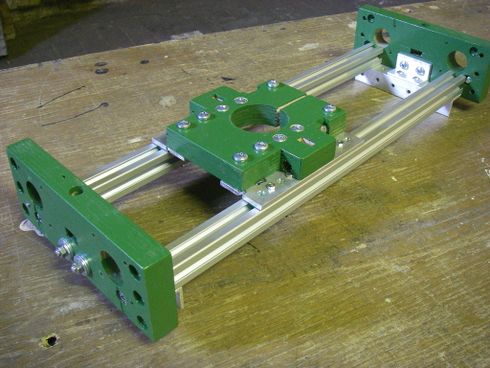
X-Gantry zusammengebaut, von oben
X-Gantry zusammengebaut, von unten
X-Gantry komplett usammengebaut, von unten

X-Gantry zusammengebaut, mit Kress FME1050 als Frässpindel









Z-Achse
Konstruktion
- Bohrautomat - Z-Achse 3D-Darstellung
Die Seitenplatten stellen die Z-Achse dar, ...
... weil hier die X-Achse rauf und runter bewegt wird


Montage der Z-Seitenplatten
- Bohrautomat - Z-Achse Montage

An die Seitenplatten werden zunächst die Halterungen geschraubt, ...

... dann werden die Seitenplatten mittels T-Slot-Profilen verbunden

und die aufrechten T-Slotprofile montiert, die als Linearführung für die Slider dienen



Y-Achse
Konstruktion
- Bohrautomat - Y-Achse 3D-Darstellung
Das gesamte Portal wird auf diesen Schlitten befestigt ...

... welche auf der langen Y-Achse laufen


Montage der Y-Achse
- Bohrautomat - Y-Achse 3D-Darstellung

Die Befestigungsplatten für das Portal ...

werden auf die Schlitten montiert.
Je Befestigungsplatte wird auch noch eine Trapezgewinde-Mutter angebracht.
Nun wird das ganze Portal so montiert, dass die Schlitten auf der Y-Achse gut und frei laufen können.

Detailansicht

und nochmal von der anderen Seite

Halter für die Y-Stepper

und für die Loslager-Kugellager
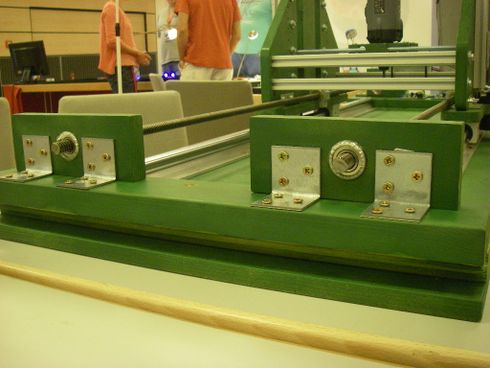
Loslager werden am Ende montiert

und Motoren am anderen Ende. Nahebei sieht man übrigens die Powerlolus und am Portal wurde die RAMPS-Steuerung mit Kabelbinder befestigt










Elektronik
Stepper-Motoren und Treiber
- Bohrautomat - Steuerung und Schrittmotor-Treiber
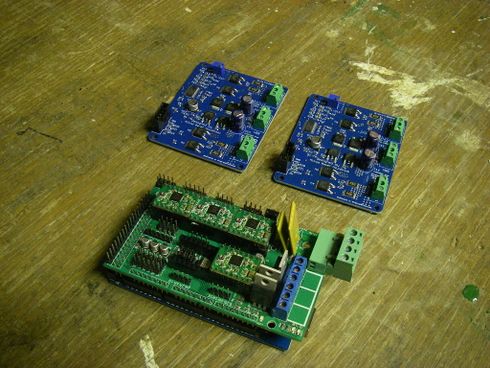
Als Steuerung dient ein RAMPS1.4 mit 4 Pololu-Steppertreibern und zwei Powerlolu-treibern für die Y-Achse, auf welcher das schwere Portal bewegt wird.
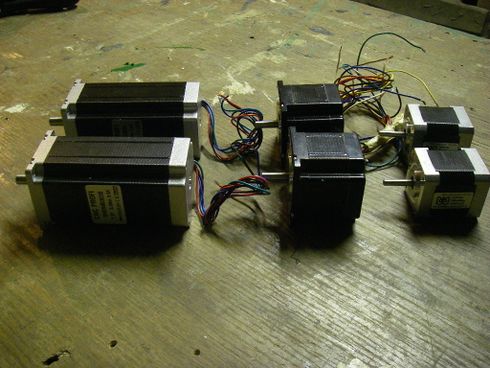
Dazu dienen die zwei großen 3Nm-Stepper. Die X-Achse wird mit den beiden mittleren 1Nm-Steppern angehoben und gesenkt und die Spindelmountplatte wird mit den beiden kleinen 0.52Nm-Steppern in X-Richtung hin- und her bewegt.


OptoEndStop
Die OptoEndstops basieren auf der Gabellichtschranke TCST1103. Ich habe meistens alle Bauteile dafür vorrätig und kann mir bei Bedarf schnell die benötigten EndStops zusammenlöten.
Eine gute Anleitung dafür findet man im RepRap-Wiki
- Herstellung der EndStopper aus Lochrasterplatine

Zunächst ein paar Stücke Lochrasterplatine aussägen und die Kanten etwas abschleifen.
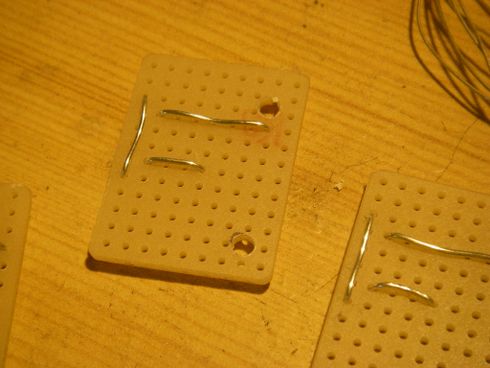
Zuerst ein paar Drähte auflöten ...

... und dann noch ein paar kleinere Bauteile: 3 Widerstände, eine LED und eine Gabellichtschranke vom Typ TCST1103

Fertig. Hier die Vorder- und Rückansicht der Endstopper.



